Computational Design of Diverse Morphologies and Sensors
for Vision and Robotics
CVPR 2024 Tutorial

Introduction
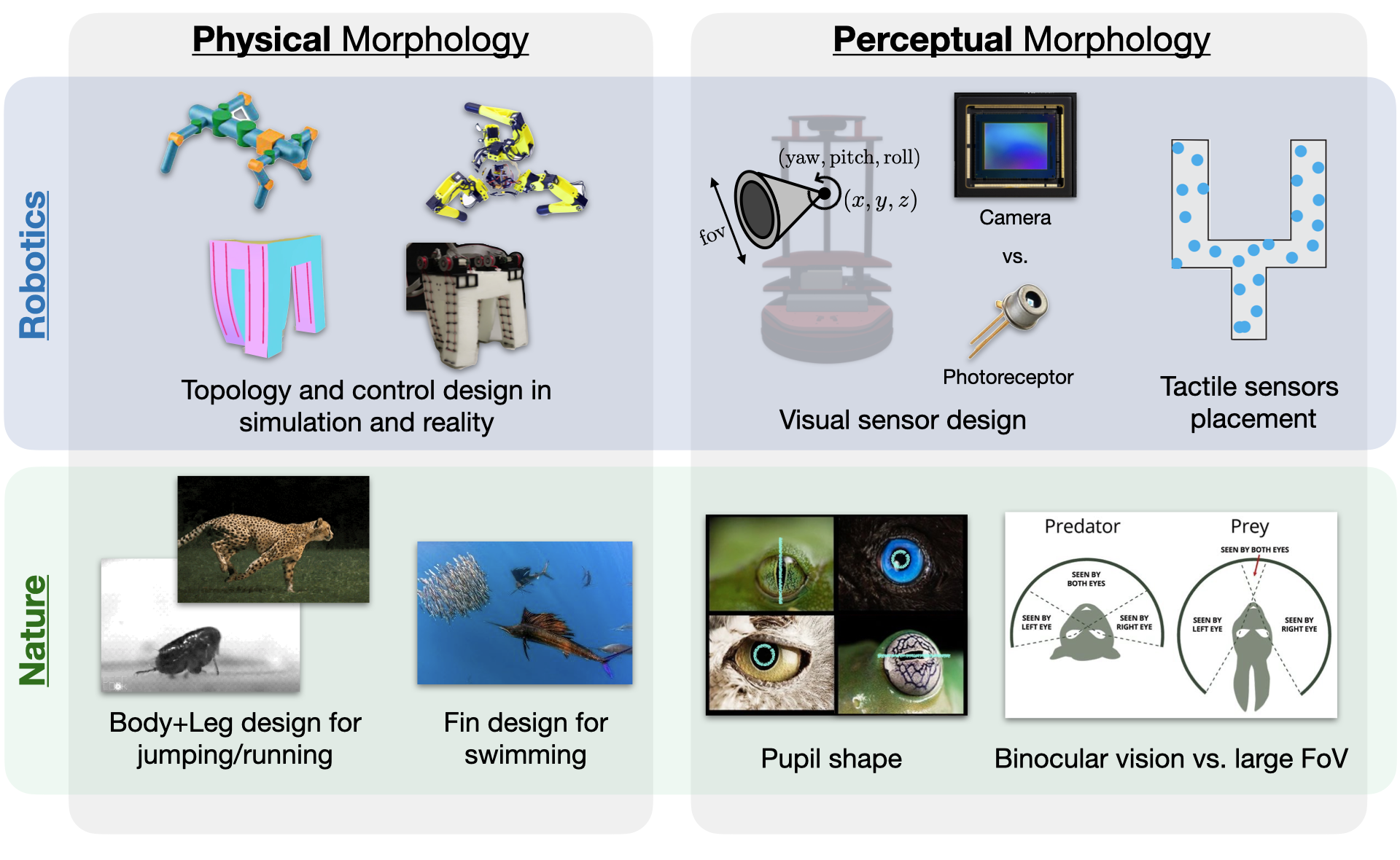
Animals exhibit a wide variety of morphologies and sensors, believed to have appeared through billions of years of evolution. Common examples relevant to vision include differences in pupil shapes, the positioning of eyes, various types of eyes, and a varying level of multimodality across animals. Such adaptations are hypothesized to be instances of the so-called Ecological Theory, which posits a strong connection between the specifics of vision and the environment surrounding the agent, its objectives, and its body. How can we replicate this diversity and achieve adaptive design in robotics and vision systems?
In this tutorial, we discuss 1) alternative forms of visual sensors that can be useful for real-world robots and 2) computational approaches to robot and vision design that can achieve the goal of adaptive design automatically, effectively, and efficiently. The tutorial covers topics in sensing, control, simulation, optimization, and learning-based design for various rigid and soft robots and visual sensors. The material is drawn from state-of-the-art breakthroughs in the field and insights from other disciplines. This material is accessible to individuals of all backgrounds and levels of expertise.
Schedule:
| 09:00 - 09:05 | 💫 Introduction | Amir Zamir |
| Visual Morphology: | ||
| 09:05 - 09:20 | 👁️ Diverse Perceptual Systems in Nature | Amir Zamir |
| 09:20 - 10:00 | 👁️ Solving Vision Tasks with Simple Photoreceptors instead of Cameras & How to Design Them | Andrei Atanov |
| 10:00 - 10:30 | 👁️ Motivations from Biological Vision: Measures and Models of Visual Acuity in Oceanic Animals | Sönke Johnsen |
| 10:30 - 11:00 | ☕️ Coffee Break | |
| Physical Morphology: | ||
| 11:00 - 11:30 | 🦾 Preliminaries and "Classical" Approaches | Andrew Spielberg |
| 11:30 - 12:00 | 🦾 Generative AI and Interfacing with the Real-World | Andrew Spielberg |
| 12:00 - 12:30 | 🏭 Neural Concept: Computational Design for Industry | Pierre Baqué, Neural Concept |
Organizers



Acknowledgments
Thanks to visualdialog.org for the webpage format.